La gestione dell'interrupt in PSoC rispecchia quanto descritto nella sezione generale.
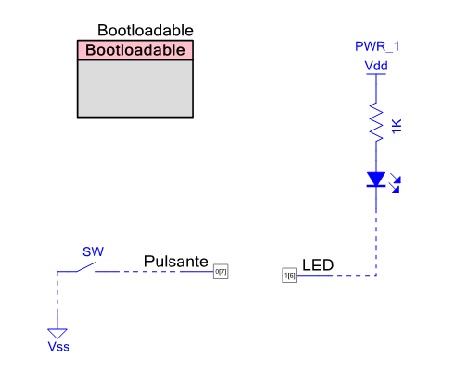
Procediamo con un facile esempio, si fa riferimento alla accensione di un LED attraverso un pulsante, prima attraverso il controllo del programma principale, poi con l'uso dell'interrupt.
Arduino Uno può gestire due interrupt (due vettori di interrupt) su due piedini il pin 2 e il pin 3. Altri modelli di Arduino hanno più ampie possibilità.
All'accensione del processore l'interrupt è abilitato, all'occorrenza si può disabilitare. Di seguito vengono riportate alcune funzioni per gestire l'interrupt ed esempi:
Il programma di un controllore embedded si svolge all'interno di un loop infinito: inizia all'accensione del sistema e termina con il suo spegnimento. L'esecuzione non ha mai termine, ma resta in attesa di segnali in ingresso (sensori) e predispone le uscite (attuatori).
Molti eventi avvengono in modo asincrono, non previsto o prevedibile da sistema. Si tratta ad, esempio, della pressione di un tasto o un di segnale da un sensore che arriva in modo non prevedibile.
Arduino è una piattaforma per lo sviluppo di progetti basati su microcontrollore, principalmente per applicazioni embedded destinate al controllo a alla automazione.
Come qualunque altro sistema a processore, anche Arduino deve sottostare ad un programma. Serve quindi un linguaggio di programmazione, un compilatore, librerie ed un modo per 'scaricare' il programma a bordo del processore.
Il programma di un sistema a processore (MCU), il firmware, risiede su una memoria non volatile. Per i dispositivi PSoC è tipicamente una memoria flash.
Per 'caricare' il firmware i metodi principali sono due:


 Arduino è una piattaforma per lo sviluppo di progetti basati su microcontrollore, principalmente per applicazioni embedded destinate al controllo a alla automazione.
Arduino è una piattaforma per lo sviluppo di progetti basati su microcontrollore, principalmente per applicazioni embedded destinate al controllo a alla automazione.

Commenti recenti